
Team
Yan Chen, leader; Indrasis Chakraborty, Jing Li, Draguna Vrabie
Problem
The development of a control system has long been dependent on the transfer of knowledge, either in the form of previous experimental data or classical design principles. Transfer-learning has been developed to help facilitate and improve the process of knowledge transfer from the source task to the target task. In the past, it has been mainly applied to binary text classification and image classification, with limited applications in control system design. Notably, in building energy systems, the current approach to transferring control knowledge is based on interpretation of control logic sequences into computer code and a human-in-the-loop approach to tuning controller parameters. Advanced control algorithms, such as model-based predictive control (MPC), have shown optimized performance with higher energy efficiency. MPC designs require significant effort and data to train the models that capture the system dynamics before optimizing the control decisions. The need for predictive models that have high accuracy is the main challenge for scalable deployment of MPC. Therefore, this project aimed to develop fundamental understanding of the controller’s transferability, and to apply transfer learning-based control to building energy system domain.
Approach
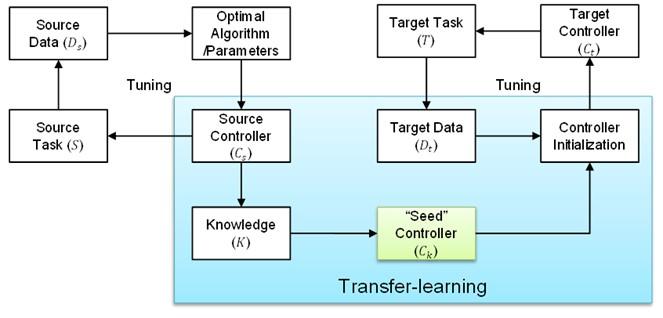
Through the project, a transfer learning-based optimal control methodology was developed. It has been demonstrated to significantly reduce the time and data required for model learning and improve operational robustness and resilience via data-driven controller optimization. Figure 1 illustrates an approach to transfer knowledge from a source task (S) to a target task (T). This methodology includes three major elements: 1) extraction of control knowledge or knowledge of tuning control parameter from a source feedback control task; 2) transferring of control knowledge from the source control task to a target control task (initialization of control parameters for the target control task); and 3) fast adaptation of control parameters to achieve optimized performance for the target task (e.g., building control).
Results
In this project, three major tasks were accomplished, including the development of transfer learning use cases in the context of building control application; theoretical derivation of the transferability for the control system (linear and nonlinear system); and a case study on a transfer-learning based control application in residential buildings. Notably, in the theoretical analysis, we investigated transfer learning in the context of the controller for dynamical systems.
First, we introduced a novel algorithm to design the transferable and non-transferable control components for linear systems. Secondly, we derived the transferability conditions on the controller between two different nonlinear dynamical systems. Finally, we numerically evaluated the performance of our transfer learning-based methods for exemplary linear and nonlinear dynamical systems (Figure 2). In the case study, we applied the transfer-learning based controller for temperature control (optimal start) in residential buildings. Two identical single-family houses located in Alaska and in Hawaii were set as the source and target system for the optimal start controller application. Preliminary results show significant savings in computational time in the case with transfer learning, compared to the case without transfer learning, while achieving the same controller performance.
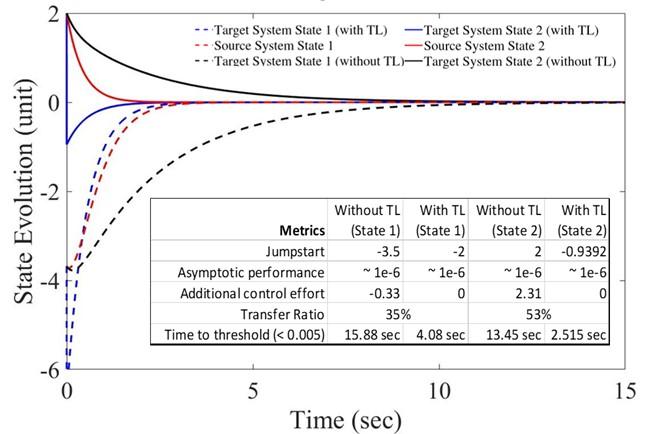
for the linear system example.
Code, Data, and Related Links
In progress
Publications
Chakraborty, I., Chen, Y., Li, J., and Vrabie, D. 2020. “Theoretical Development of Controller Transfer applied to Dynamical Systems.” In Proceedings of the Eleventh ACM International Conference on Future Energy Systems (pp. 445-453). https://doi.org/10.1145/3396851.3402368