Differentiable Predictive Control
Lead: Draguna Vrabie
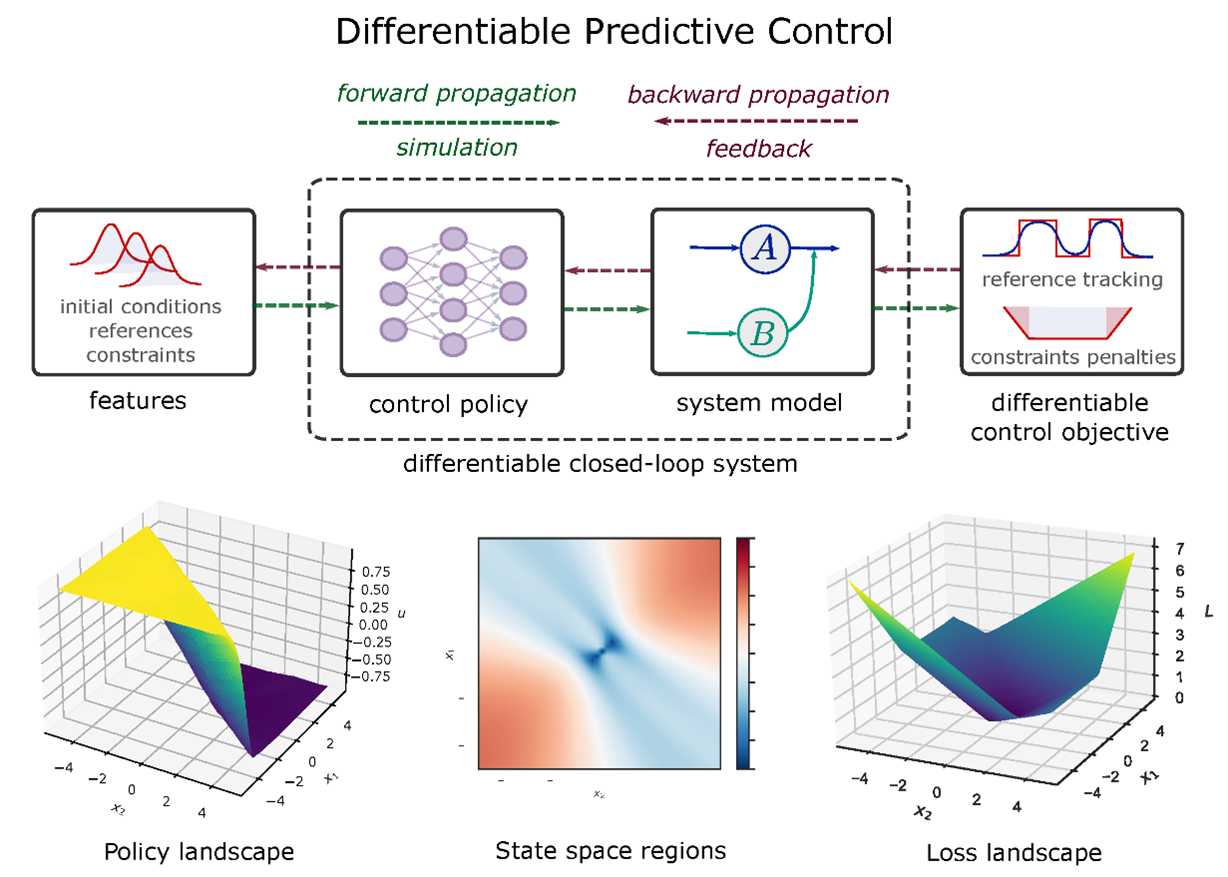
Model predictive control (MPC) is a process control method that functions under a set of constraints. It uses a model to make predictions about future outputs of a process. MPC has a variety of applications, from manufacturing and robotics to clinical uses. Learning-based MPC uses machine learning alongside MPC to extend trustworthy predictive control algorithms to an exciting new range of applications previously economically and operationally infeasible (e.g., building energy management, power grid load balancing).
Pacific Northwest National Laboratory Advanced Computing, Mathematics, and Data Division researchers are developing a suite of learning-based control synthesis methods called differentiable predictive control that systematically combines machine learning models and MPC in a coherent algorithmic framework. To facilitate the adoption of the technology in practice, the team has created Neuromancer, an open-source framework implementing various physics-informed machine learning methods for modeling dynamical systems, learning-based constrained optimization, and optimal control problems. The framework and methods will provide capabilities for scalable, fieldable, and assured operation to support basic science and real-world engineering applications.
Publications:
- Drgona J., K. Kis, A. R. Tuor, D. L. Vrabie, and M. Klauco. 2022. “Differentiable Predictive Control: Deep Learning Alternative to Explicit Model Predictive Control for Unknown Nonlinear Systems.” Journal of Process Control 116: 80–92. https://doi.org/10.1016/j.jprocont.2022.06.001.
- Bhattacharya A., X. Ma, and D. L. Vrabie. 2022. “Model Predictive Control of Discrete-Continuous Energy Systems via Generalized Disjunctive Programming.” Modeling, Estimation and Control Conference, (MECC 2021), October 24–27, 2021, Austin, TX. IFAC-PapersOnLine 54 (20), 913–918. https://doi.org/10.1016/j.ifacol.2021.11.288.
- Drgona J., A. R. Tuor, S. E. Skomski, S. S. Vasisht, and D. L. Vrabie. 2021. "Deep Learning Explicit Differentiable Predictive Control Laws for Buildings.” 7th IFAC Conference on Nonlinear Model Predictive Control, (NMPC 2021), July 11–14, 2021, Bratislava. IFAC-PapersOnLine, 54: 4–19. https://doi.org/10.1016/j.ifacol.2021.08.518.
- Wang J., K. Garifi, K. Baker, W. Zuo, Y. Zhang, S. Huang, and D. L. Vrabie. 2020. “Optimal Renewable Resource Allocation and Load Scheduling of Resilient Communities.” Energies 13 (21): 5683. https://doi.org/10.3390/en13215683.
- Drgona J., L. Helsen, and D. L. Vrabie. 2020. “Cutting the Deployment Costs of Physics-Based MPC in Buildings by Simulation-Based Imitation Learning.” ASME 2020 Dynamic Systems and Control Conference, October 5–7, 2020, Virtual. New York, New York. https://doi.org/10.1115/DSCC2020-3118.
- Drgona J., J. Arroyo, I. C. Figueroa, D. Blum, K. Arendt, D. Kim, E. P. Ollé, J. Oravec, M. Wetter, D. L. Vrabie, and L. Helsen. 2020. “All you need to know about model predictive control for buildings.” Annual Reviews in Control 50: 190–232. https://doi.org/10.1016/j.arcontrol.2020.09.001.
- Drgona J., D. Picard, and L. Helsen. 2020. “Cloud-based implementation of white-box model predictive control for a GEOTABS office building: A field test demonstration.” Journal of Process Control 88: 63–77. https://doi.org/10.1016/j.jprocont.2020.02.007.
- Drgona J., L. Helsen, and D. L. Vrabie. 2019. “Stripping off the implementation complexity of physics-based model predictive control for buildings via deep learning.” 33rd Conference on Neural Information Processing Systems (NeurIPS 2019), December 8–14, 2019, Vancouver, Canada. PNNL-SA-147272.
- Cortez, W. S., J. Drgona, A. Tuor, M. Halappanavar, and D. Vrabie. 2022. "Differentiable Predictive Control with Safety Guarantees: A Control Barrier Function Approach." 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, December 6–9, 2022. https://doi.org/10.1109/CDC51059.2022.9993146.
- King, E., J. Drgona, A. Tuor, S. Abhyankar, C. Bakke, A. Bhattacharya, and D. Vrabie. 2022. "Koopman-based Differentiable Predictive Control for the Dynamics-Aware Economic Dispatch Problem." 2022 American Control Conference (ACC), Atlanta, GA, June 8–10, 2022. https://doi.org/10.23919/ACC53348.2022.9867379.
- Rahman, A., J. Drgoňa, A. Tuor, and J. Strube. 2022. "Neural Ordinary Differential Equations for Nonlinear System Identification." 2022 American Control Conference (ACC), Atlanta, GA, June 8–10, 2022. https://doi.org/10.23919/ACC53348.2022.9867586.
- Mukherjee, S., J. Drgoňa, A. Tuor, M. Halappanavar, and D. Vrabie. "Neural Lyapunov Differentiable Predictive Control." 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, December 6–9, 2022. https://doi.org/10.1109/CDC51059.2022.9992386.
- Cortez, W. S., S. Vasisht, A. Tuor, J. Drgoňa, and D. Vrabie. “Domain-aware Control-oriented Neural Models for Autonomous Underwater Vehicles.” 12th IFAC Symposium on Nonlinear Control Systems. https://doi.org/10.48550/arXiv.2208.073.
- Koch, J., Z. Chen, A. Tuor, J. Drgona, and D. Vrabie. 2023. “Structural Inference of Networked Dynamical Systems with Universal Differential Equations.” Chaos: An Interdisciplinary Journal of Nonlinear Science 33: 023103. https://doi.org/10.1063/5.0109093.