Dynamic Paradigm for Grid Operation
A dynamic state estimation and model calibration tool utilizing phasor measurements and high-performance computing technologies
POC: Shaobu Wang

Background
Today’s grid operations are based on the static power flow model, which describes the steady state (or quasi-steady state) of the grid. Recent developments in phasor technology make estimating dynamic states possible with high-speed time-synchronized measurement data. Advancements in high performance computing enable the associated computation to be finished within the short time intervals required for real-time power grid operation. For future power grids with intermittent renewable energy sources and responsive loads, it is essential to establish a dynamic operation paradigm in contrast to today’s operation built on static state estimation. Such a dynamic paradigm will include three fundamental components: dynamic state estimation, look-ahead dynamic simulation, and dynamic contingency analysis as illustrated in Figure 1. Essentially, these three components answer three basic questions: where the system is; where the system is going; and what are other possible futures for the system.
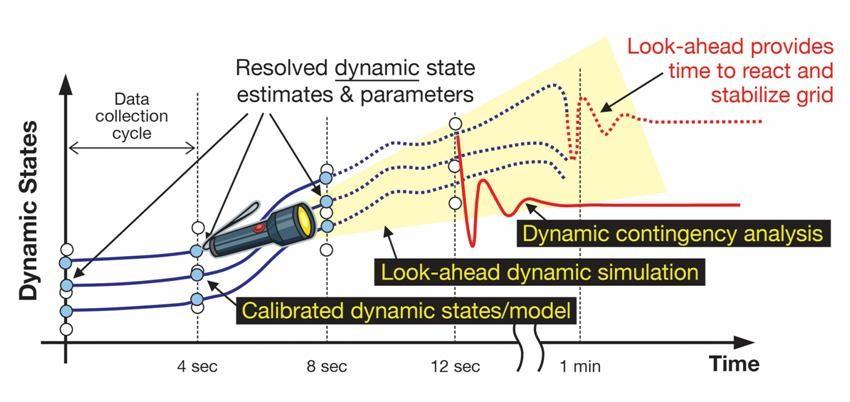
State estimation, as a central function in power grid operations, generates critical inputs for other operational tools. Traditional state estimators receive telemetered data from a supervisory control and data acquisition (SCADA) system in the time interval of several seconds. The telemetered SCADA data is used in conjunction with a steady-state system model to estimate a set of static state variables, i.e., bus voltages and phase angles. The result of computing only the static state variables is that the state estimator generates a series of snapshots of the system conditions, in which the dynamic transition between the snapshots is not considered. Recent developments in phasor technology make estimating dynamic states (e.g., rotor angle and generator speed) possible with high-speed time-synchronized measurement data. Phasor measurement units (PMU) with a typical sampling rate of 30 samples per second currently are able to capture the major dynamics in power grids, and thus enable dynamic state estimation. Dynamic state estimation provides a full dynamic view of a power grid, which further enables look-ahead dynamic simulation and dynamic contingency analysis.
Additionally, the integrity of power-system models is key to reliable and economical electricity delivery to power consumers, because long/mid-term planning and operational decisions rely heavily on static and dynamic simulation studies derived from such models. Inaccurate models can significantly affect study results, leading to conclusions that deviate from reality, thus jeopardizing system designs and affecting decision making. A few well-known blackouts in North America, including the 1996 Western States outage and the 2011 blackout in San Diego, have identified significant deficiencies in the models being used in the power industry: simulations showed stable and well-dampened system response, but in reality, the system eventually collapsed following critical contingencies. Periodically validating stability models for generators, exciters, governors, and power-system stabilizers becomes critically important to generator owners and independent system operators for maintaining power-system security. Currently, the North American Electric Reliability Corporation (NERC) requires validation and calibration of models for large generators and their controllers in North America every five years, with a main goal of having dynamic model performance match the recorded measurements reasonably well.
So far, the most commonly used methodology for performing power plant model validation is through staged tests, which are well established procedures. However, the cost of staged tests can be expensive, because the tested generators will be taken offline and not able to produce electricity for revenue. With the development of PMUs across North America over the past two decades, the use of disturbance recordings has become accepted as a low-cost alternative for verifying models without the need to take generators offline. The model validation approach of using measured data (play-in signals) in time domain simulations has been widely adopted by software vendors, such as GE PSLF, SIEMENS PTI PSSE, PowerWorld Simulator and TSAT. Tools and services have also been developed to provide parameter calibration for power plants. According to the latest NERC guideline on power plant model validation, there are still issues and technology gaps in the existing tools. For example, multiple solutions may exist for the same model performance after launching the calibration procedure, which makes it difficult to identify the true parameter set. Therefore, in order to improve the performance of model validation and calibration, advanced mathematical techniques and automatic tools need to be developed.